

ダイナミクス整合
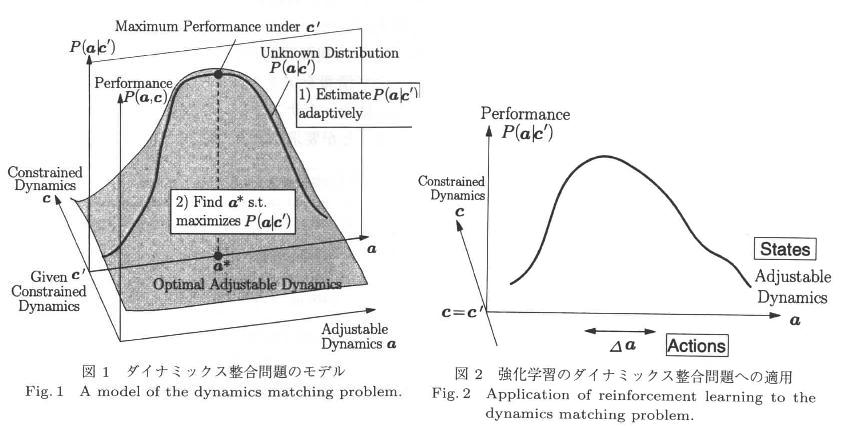
ロボットの感覚系,処理系,運動系」を矛盾なく統合し、感覚運動統合システムとしてそのパフォーマンスを最大限に発揮させるには,各要素単独での高速性のみを議論しても無意味であり,互いの時間特性を考慮し,整合させることが必要になる.このような問題意識を「ダイナミクス整合」として提起する。そこで,状況の変動に応じてダイナミックス整合の状態をオンラインで適応的に獲得させるダイナミックス整合を最適化問題とみなしてモデル化し,適応的獲得アルゴリズムを提案した.そして,ターゲットトラッキングタスクを例題として数値実験によりその効果を検証した.
研究成果
- 尾川 順子, 阪口 豊, 並木 明夫, 石川 正俊 : ダイナミクス整合にもとづく感覚運動統合 -ターゲットトラッキングにおける戦略の学習-, 電子情報通信学 信学技法, pp.47-54,2001年3月
- 尾川 順子, 阪口 豊, 並木 明夫, 石川 正俊 : 感覚運動統合システムにおけるダイナミクス整合の適応的獲得,電気情報通信学会論文誌 D-Ⅱ,VOL.J87-D-Ⅱ No.7,pp.1505-1515,2004,JULY
- Naoko Ogawa,Yutaka Sakaguchi,Akio Namiki,Masatoshi Ishikawa : Adaptive Acquisition of Dynamics Matching in Sensory-Motor Fusion System,Electronics and Communications in Japan,Part3,Vol.89,No.7,2006