

能動的な触知覚認識システム
人間は、手で触れて対象を知覚するとき、皮膚に埋め込まれた種々の感覚受容器からの情報を統合することによって総合的に判断を下す。
また、押す・つまむ・擦るといった様々な触運動を選択的に行うことにより、対象を理解するのに有効な情報を効率的に収集する。
このような触覚に関わる能動的な感覚を、単純な皮膚感覚を表す狭義の触覚と区別して「触知覚(haptics)」と呼ぶ。
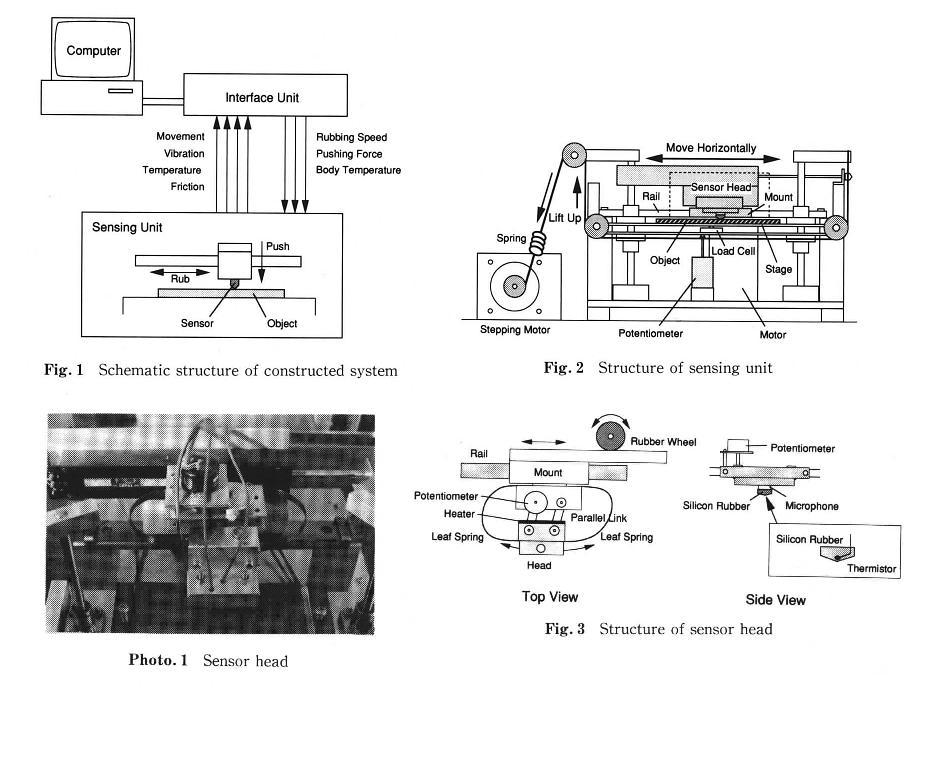
本研究では、このような触知覚過程の特徴に着目し、対象表面を種々の条件で擦りながら数種類のセンサ情報を統合することによって、
人間と類似した方法で対象の質感や手ざわり感を識別する触知覚認識システムを構成した。
発表文献
- 阪口 豊:能動的感覚統合による触知覚認識システム, 計測時動制御学会論文集, 31, 1217-1226, 1995.
- Sakaguchi,Y.:Haptic sensing system with active perception, Advanced Robotics, 8, 263-283, 1994.
- Sakaguchi, Y. and Nakano, K.:Haspic recognition system with sensory integration and attentional perception, Proceedings of IEEE International Conference on Multisensor-integration and Fusion in Intellient System, 288-295, 1994.(MFI-94)
- 阪口 豊:能動的感覚統合に基づく触知覚認識システム, ロボティクス・メカトロニクス講演会'94 論文集, 293-298, 1994.
- 住友謙一, 阪口 豊, 中野 馨:触知覚感の定量化に関する研究, 第32回計測自動制御学会学術講演会予稿集, 33-34, 1993.
- 黒川朋也, 阪口 豊, 中野 馨:意図的センシングシステム, 第31回計測自動制御学会学術講演会予稿集, 672-672, 1992.
- 阪口 豊:触知覚における感覚統合と能動的認識, 電子情報通信学会誌, 76, 1222-1227, 1993.