

信頼度を用いた運動計画のアルゴリズム
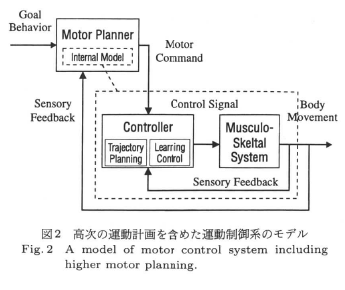
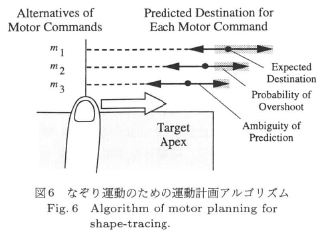
人間の運動計画が運動に慣れるに従って変化することに着目し、適応の進行に応じて適切な運動指令を生成する運動計画のアルゴリズムを構成した.本アルゴリズムは、運動に不慣れな間は誤りをおかさないように小さな運動指令を出力し、運動に慣れるに従って大きな運動指令を出力するものである.本アルゴリズムを定式化する上で、適応の進み具合をシステム内部で評価する「内部モデルの信頼度」という概念が重要な役割を果たす.本論文では、まず一般的なアルゴリズムを確率モデルに基づいて記述したのち、具体的な例題として図形の縁をなぞる運動を取り上げ、提案したアルゴリズムがこの課題を実行する際の人間の振舞いをうまく模擬することを数値実験によって示す。また、考察として、提案したアルゴリズムと従来の軌道計画、学習制御モデルとの関係や、随意運動遂行における感覚情報獲得のメカニズムについて議論する.
発表文献
- Sakaguchi, Y. and Takano, M. Reliability of Internal Prediction/Estimation and Its Application. I. Adaptive Action Selection Reflecting Reliability of Value Function, Neural Networks, 17, 935-952, 2004.
- 阪口 豊:内部モデルの信頼度に基づく運動計画のアルゴリズム,電子情報通信学会,J79-D-II, 248-256, 1996.
- Sakaguchi, Y. and Nakano, K.: Motor planning according to reliability of internal model, Proceedings of International Joint Conference on Neural Networks, II, 1321-1324, 1993. (IJCNN-93-Nagoya)
- Sakaguchi, Y. and Takano, M: Learning to Switch Behaviors for Different Environments: A Computational Model for Incremental Modular Learning, Proceedings of 2001 International Symposium on Nonlinear Theory and its Applications (NOLTA-2001), 383-386, 2001.
- 阪口 豊,高野 光雄: 内部モデルの信頼度に基づく強化学習のアルゴリズム,第11回日本神経回路学会全国大会,103-104, 2001.
- 阪口 豊,高野 光雄:環境変化への適応と文脈切替え,第16回生体・生理工学シンポジウム論文集,157-160, 2001.